
I recently demonstrated that soaring is an objectively dangerous pastime. On a per-activity-hour basis it is approx. 35 times as dangerous as driving, 70 times as dangerous as bicycling, and still about 3 times as dangerous as riding motorcycles.
One contributing factor has to do with the high number of fatalities during soaring competitions. (This article shows that during global soaring contests, the number of fatalities per number of flights has been more than 10 times higher than during flights outside of competitions.) Even though there is no (relevant) price money on the line, contests tend to tempt pilots into lowering or suspending their normal safety standards. To have a chance of winning or placing well, pilots are often inclined to take higher risks than they normally would accept – consciously or subconsciously. E.g., they will fly closer to terrain than they would on a normal cross-country day; they will fly in bigger gaggles, thermal closer to stalling speed, get closer to Vne – even in turbulent air, attempt safes lower to the ground, scrape across ridges or mountain passes, fly low over unlandable terrain, calculate their final glides with a narrower margin, etc.
It’s the same behavior I observe (and – to be honest – participate in myself) during races on the Condor competition soaring simulator. Fortunately it’s a simulator so if you crash you still get to live another day. But I’ve found that the dynamics in human behavior are very similar to real life competitions. No one wants (or expects) to crash but at the same time, most everyone flies in ways that they would consider irresponsible outside a contest environment. Sure, taking great risks won’t guarantee a good placement, but a good placement almost inevitably means that the pilot assumed a high degree of risk.
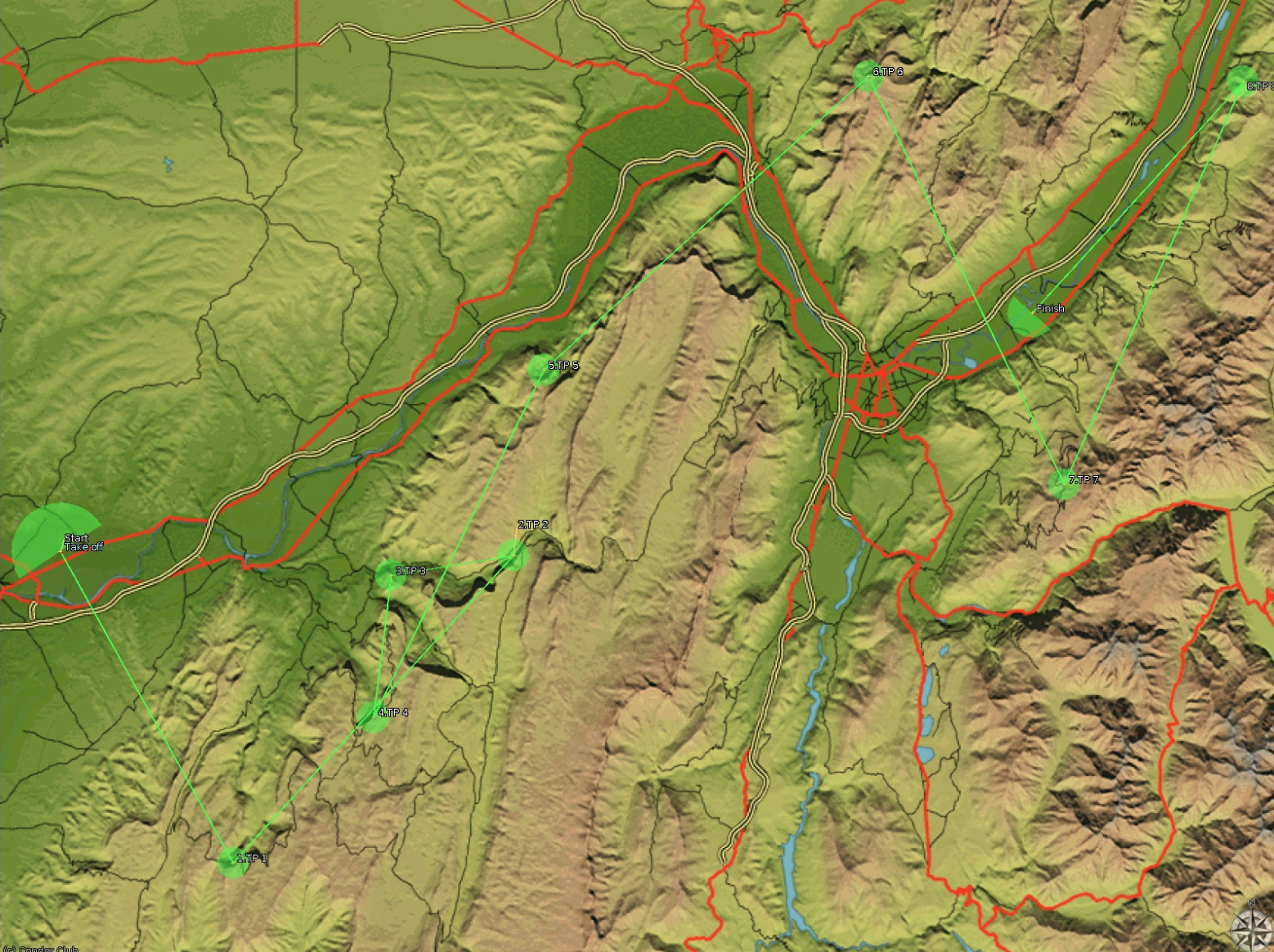
Here’s an example: yesterday I flew a Condor race set in the foothills of the French Alps as part of a competition called Regatta Cup. It was a short 188 km Club-Class task along and across several low mountain ridges. Thermals were moderate but a steady 12-14 kt wind from west-north-west made for optimal ridge flying conditions along the steep slopes of the area. As the name Regatta Cup implies, the race was to start at a set time for everyone with all 26 gliders trying to cross the start line below 1,800m simultaneously and as close to Vne as possible. From there they would all fly along the same course, round eight tightly-spaced turn points, then dash for the finish line.
The start was set away from any of the ridges so big gaggles formed underneath one of the few cumuli west of the Romans Saint Pau airfield. Cloud base was around 2,200 meters so everyone circled up to the base of the clouds and tried to stay there in order to maximize the potential energy when the start gate would open. 26 gliders were sharing two thermals, all flying within an altitude band of approx. 50 meters. I was not surprised when I witnessed two pairs of gliders colliding with one another. In fact, I had several close calls myself – and all of that before the race even got underway.
Trying to stay aware of everyone around me I began to dive about 20 seconds before the start of the race. Burning excess energy using the spoilers and watching the altimeter, the speedometer, the GPS, and the traffic around me all at the same time, I managed to cross the start line about 5 seconds after it opened, 20 meters below the ceiling, flying just below Vne with a ground speed of 272 kph. I considered this a very good start even though about half of the competitors were already ahead of me and the other half only seconds (or fractions thereof) behind. And, luckily, I was still alive.
With the wind at the tail and flying at a “conservative” air speed of 160-170 kph the altitude at the start was just sufficient to get the unballasted LS4 to TP1. I was in the bottom third of the pack but the leaders were less than a minute ahead. From there the ridge race began. The strongest lift tends to be near the top of the ridges and not more than one or two wingspans away from the terrain. That means everyone will attempt to fly in that narrow zone between winning and dying, and with so many gliders packed into the same tight spot at the same time, surviving is not much more than a game of Russian roulette.
Added to this is the complexity of different climb rates based on the angle of the ridge line with respect to the wind. You look ahead trying to anticipate where the best climbs are likely to be. Just before you get there you pull up sharply in order to fly two or three seconds longer through the best climb zone, then you push the nose down again, even more so if you anticipate an area of sink. Everyone else tries to do the same thing: flying as close to the ridge as possible, pulling up right before the best climbs, pushing down right before any anticipated sink. In doing so the speed of the glider might vary anywhere between minimum sink speed and three times as fast. Each time the altitude fluctuates by 200-300 meters as speed gets converted into height, or height gets converted into speed. Pulling up or pushing down too early or too late, or incorrectly judging the strength of the lift, costs precious seconds that add up and ultimately decide about your placement. Flying like this is more than risky enough if you are the only one around but doing so in the midst of a pack of more than 20 gliders is simply an enormous gamble.
After several close calls between TP1 and TP4 and being about two minutes behind the leaders at this time, I decided not to follow the gaggle in front of me on the direct route to TP 5 but to take a slightly longer route along the higher and steeper ridges further to the east, hoping not only for better climb rates along this route but for some stress relieve as well.
Soon I discovered that I faced another challenge: there was a mountain pass in front of me. I didn’t want to waste any time turning so I hugged the mountainside and flew at minimum sink speed hoping that the lift would be strong enough to carry me over the pass before I got there. I was aware that this was a hugely risky maneuver: if a wind gust would force the glider to stall I would not have enough altitude to recover before hitting the ground. And if a thermal would break off on the valley side and turn the glider towards the slope, I could easily get pushed into the trees. “There is no way I would fly like this in real life,” I thought.
The gamble paid off and I made it across the pass and dove for TP 5. As I got there I noticed that I had caught up with the pack. I could still see several gliders ahead of me but they seemed a few hundred meters lower. With a valley to cross ahead, they would likely have to stop to climb somewhere while I could cruise along the top of the ridge at a much higher speed. I dove across the valley at over 250kph and still reached the ridge on the other side at a good altitude. Again, I hugged the higher ridge to the east while the handful of gliders ahead of me were lower and further west.
There was another valley to cross between TP 6 and TP7. Again I put the nose down only to realize shortly thereafter that I would arrive too low on the other side. I dialed the speed back to 140kph – my slowest cruising speed of the entire race – to conserve what altitude I had left. As I headed straight towards TP 7 the trees on the slope ahead of me were getting closer and closer. Would I be able to get to the turn cylinder before the trees would get me? I wasn’t sure but just as I was forced to initiate a turn right over the tree tops the GPS confirmed that I had rounded the TP. If I had only been 20 meters lower I would have had to turn away from the slope and find a spot to climb.
Having turned TP7 I could now hug the ridge again and fly toward TP8, the final turn point. I could only see one glider ahead of me. My final glide calculator indicated that I would arrive a few hundred meters too low but I was confident that I could easily make that up by hugging the ridge between TP 8 and the finish line. So I decided to dive, flying a direct route towards TP8. I kept watching the other glider to my right and though that I might have a chance to beat him. I reached the next ridge closer to the valley with only 5 kilometers to go to TP8 and 20 kilometers to the finish when … I suddenly died.
Another glider that I had not noticed must have been slightly above or below me. I had not seen him at all and I must believe that he had not seen me either. It was quite a shock and a revelation. Obviously, had this been in real life I would not be here to write about this experience. Instead, my wife and children would stand by my graveside and wonder, with tears in their eyes, how this could have happened.
Yes, I know, Condor is just a game. I must and do believe that I would not have taken many of the risks described, if I had been in a real glider. Also, some of the race settings described here are not realistic. For starters, contest directors are unlikely to plan a task that is as dangerous as this one.
However, there are many things that are not so different from real life. The pressure of the competition, the desire to win, the fear of embarrassment. Also the fact that taking high risks does have the potential of giving you an advantage in the race: circling in gaggles under the cloud base to conserve energy for the start, flying close to ridges without adequate safety margin, hugging the tree tops, scraping over mountain passes, circling at minimum speed close to the ground, flying low over unlandable terrain, aggressively calculating the final glide – all these are risks that have killed many real life pilots. I believe that this is especially true in race settings when usual risk-mitigation strategies get too often ignored or even willfully suspended.
BTW – in case you’re wondering: I did analyze my flight track and those of the eventual race winners. I believe that I would have come second or third in that race – it would have been my best result against some of the world’s best Condor pilots. You can see the race results here. However, it was definitely not worth dying for.
Great article perhaps because your experience and views match my own. There’s another issue worth examining, too. To what extent do we develop habits in the sim that we take with us into the real world? I’ve pulled a number of bonehead maneuvers in Condor but survived. Like successful duels with thunderstorms, does that mean we’ll be less cautious next time?
Good question. I don’t know the answer. I know I fly more conservatively in real life but I can’t really say what influence (if any) the sim has on my real life behavior. I’ve explored this a little in https://chessintheair.com/why-practice-with-condor/ where I wrote about the benefits but also some of the limitations of Condor as a practice tool. What is your perspective on this?
In general, I think simulators are a huge benefit. You fly with your head not with your hands, after all. And the financial, time, and risk advantages are dramatic.
I stumbled on the article you provide a link to a few weeks ago and you wrote exactly what I would have written ( although you said it far better than I would have.)
The adage, “Train like you fight, flight like you train” goes to the concern we both seem to share: when your butt isn’t really on the line you probably make decisions you wouldn’t make otherwise. The problem is that neural pathway has been greased and the next time its tweaked it will fire more easily (to oversimplify the neurology.)
That said, I think we can have that little talk with ourselves that does something like, “Look, you got away with exactly this situation in Condor, but this is real reality and a mistake here can be very expensive. Real {rocks,clouds,collisions,flutter,etc} don’t get fixed with a pause key or refly.”
The answer, of course, is a perfect simulation. But I doubt anyone would buy one that included a realistic “pilot deceased” function. Still, better modeling of rotors, unexpected weather, some way of including more realistic effects of entropy, and other “gotchas” will make games more fun and the training derived more valuable.
I love simulators! My wife and I used to run a flying business with all kinds of cool old airplanes and the airport joke was that if they couldn’t fin me I was probably home flying a sim. More truth than humor, that.
Thanks for your thoughtful response! Yes, risk habituation is a real concern, i.e., the theory that we are inclined to perceive less of a risk the more often we engage in risky behavior and get away with it because “nothing happened”. And the sim can probably contribute to this as well. My main defense strategy is to think hard about the risks so I won’t “conveniently forget them”. More on this topic here: https://www.nsc.org/Portals/0/Documents/CambpellInstituteandAwardDocuments/WP-Risk%20Perception.pdf
Excellent Campbell article. The risk compensation/homeostatis theory was particularly interesting, disputed though it may be, and a concept I wasn’t aware of.
Our human predilection to ignore low probability, high consequence risk has always fascinated me; but, ironically, most of my thinking about risk has been related to how to encourage risk-taking — how to develop corporate risk tolerance as a strategy to support innovation in a rapidly changing world. But, of course, that’s a very different kind of risk than the kind we worry about in an aircraft.
Experience is a hard teacher because the test comes first, then comes the lesson, so learning from someone else experiences is very valuable. Thank you for taking the time to share your soaring experiences.
Excellent Campbell article. The risk compensation/homeostatis theory was particularly interesting, disputed though it may be, and a concept I wasn’t aware of.
Our human predilection to ignore low probability, high consequence risk has always fascinated me; but, ironically, most of my thinking about risk has been related to how to encourage risk-taking — how to develop corporate risk tolerance as a strategy to support innovation in a rapidly changing world. But, of course, that’s a very different kind of risk than the kind we worry about in an aircraft.
Experience is a hard teacher because the test comes first, then comes the lesson, so learning from someone else experiences is very valuable. Thank you for taking the time to share your soaring experiences.
Perhaps we might consider introducing a penalty for ‘dying’ (as if dying ain’t enough).
Rather than a “Q” points penalty, howsabout a sidelined penalty – “if you ‘die’, you can’t compete in the next task”?
It’s been my experience that risk taking in Condor is motivated by the success of unrealistic maneuvers and dangerous strategies (I confess).
Everyone wants to win, but it’s a hollow victory if the risks were unrealistic. Missing the next task would encourage me to aim for victory but plan for survival.
(There’s wrinkles in my proposal I know – Condor allows more than one ‘Pilot’).